










SYSTEM 5000 V2 サイドスキャンソナー
マルチビームサイドスキャンソナー


SYSTEM 5000 V2 サイドスキャンソナー
マルチビームサイドスキャンソナー
多機能サイドスキャンソナー
| Klein Marine System 社の最先端マルチビームサイドスキャンソナーSYSTEM 5000 V2 は、トウフィッシュの両側に各5 本(計10 本) の水平ソナービームを同時に生成しており、曳航速度10 ノットでも非常にシャープな高解像度海底イメージを取得することができます。 SYSTEM 5000 からSYSTEM 5000 V2 へのアップグレードによって追加されたリカナサンスモードは、16 ミリ秒の周波数変調チャープテクノロジーとビームステアリング、ダイナミックフォーカシング技術の組み合わせにより、すべてのレンジ設定と速度で一貫した舷側方向解像度を得ることができます。(測定レンジ150m ~ 250m の範囲で舷側方向解像度36cm ~ 61cm を維持しながら、片側最大250 m のロングレンジ性能を実現。) オプションでSBS 機能(スワス測深機能)も有しており、高度なインターフェロメトリ信号処理により、全スワス範囲(曳航体高度の10 ~ 12 倍程度) の海底地形の推定値を同時に生成します。このデータは、サイドスキャンソナーイメージと合わせて記録され、海底のターゲットをより正確に把握するために有効です。 |
 |
|
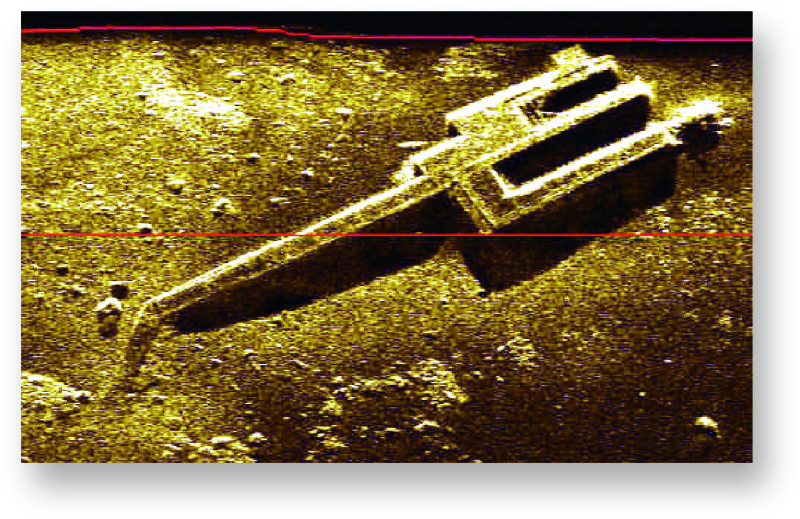
バングスベルクの難破船
|

特徴
・最大250 メートルのロングレンジリカナサンスモード
・高速曳航調査(最大10 ノット)
・業界最高解像度のマルチビームテクノロジー
・耐圧500 m(SBS 機能付 200m)
・インターフェロメトリスワス測深
サイドスキャンソナーとは
| 曳航体(トウフィッシュ) の左右から扇状に超音波を発信し、返ってきた音波(エコー) の反射強度の濃淡を連続描画することにより、海底面を航空写真のような広範囲の画像として取得することができる技術です。底質分類調査(礫、砂、泥、藻場などの分布) や、漁礁などの構造物の状態調査、落下物の捜索など様々な用途に用いることができます。 | 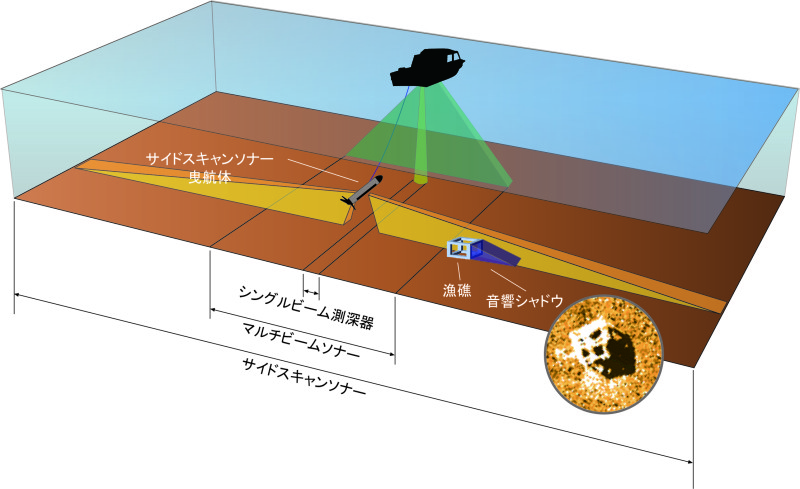 |
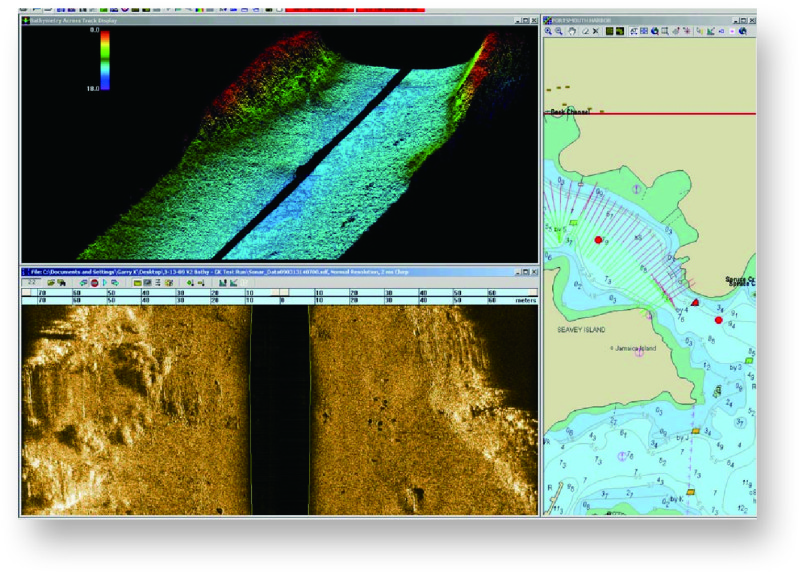
SonarProソフトウェアパッケージ
| ソナーユーザーのためにソナーユーザーによって設計されたサイドスキャンソナーデータ収集および処理ソフトウェアパッケージです。 ソナー制御、ソナーデータ表示、センサーデータ表示、曳航体の状態など複数のウィンドウを同時に表示することができます。 |
 |
|
・ソナーシステムのセットアップ、操作、制御 |
分散処理技術
| SYSTEM 5000 V2 はSonarPro を用いて、トランシーバープロセッサユニット(TPU) をPC またはワークステーションに接続します。このシステムは非常にフレキシブルで、以下のような機能を複数のクライアントがサーバーから同時に操作できます。 | 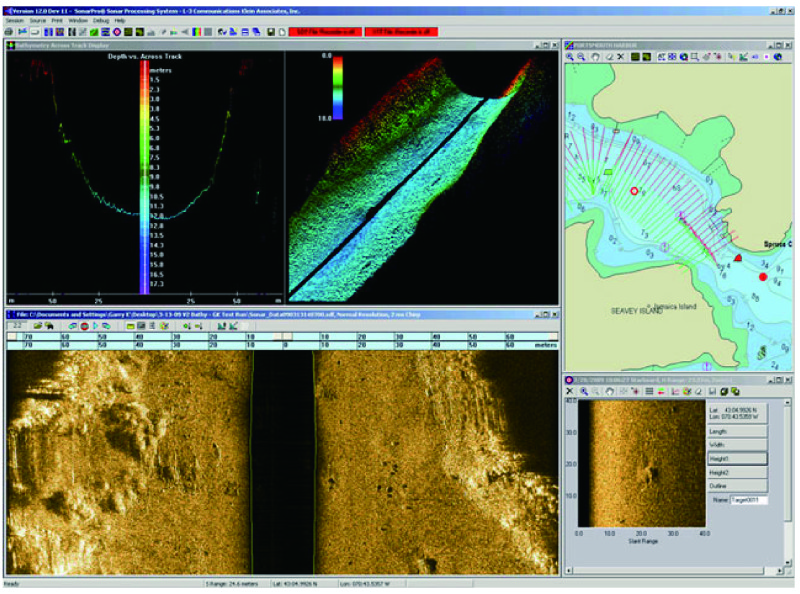 |
| ・アーカイブ用の生データストレージ ・複数のオペレーターによるリアルタイムデータ表示と処理 ・リモートワークステーションへのリアルタイムデータ送信 ・画面ウィンドウでリアルタイムデータを監視しながらのデータ処理 ・リアルタイムデータ収集に影響を与えないデータのレビュー |
SBS機能(スワス測深機能)
| 高度なインターフェロメトリ信号処理により、全スワス範囲(曳航体高度の10 ~ 12 倍程度) までの海底地形の推定値を同時に生成します。測深機能を持たないサイドスキャンソナーは、海底にあるターゲットの位置を測定するときに、局所的に平らな底を想定する必要があり、もし調査エリアが傾斜していた場合は、メートル単位のターゲット位置エラーが発生する可能性がありました。 この機能を併用することにより、海底地形を正確に計測できるため、斜面や浅瀬を含むミッションの際などのエリア評価をするときに非常に便利です。 | 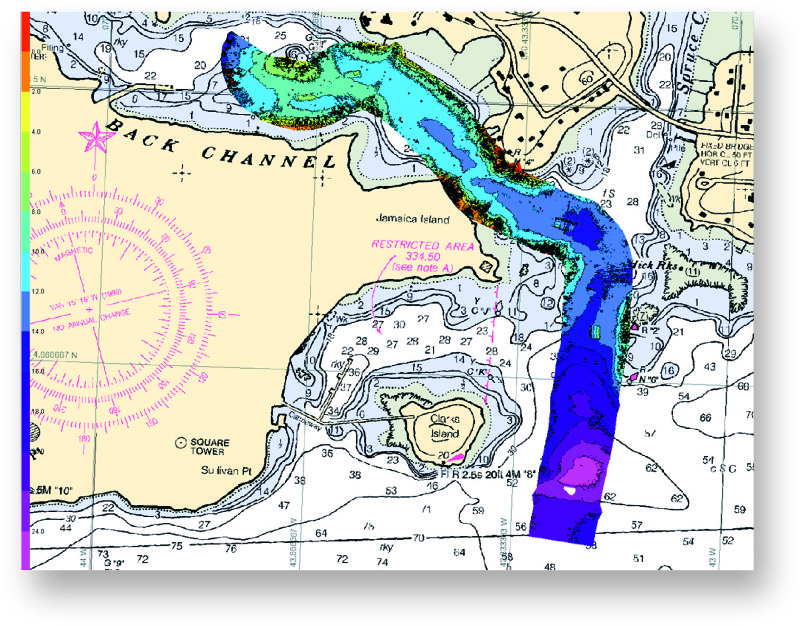 |
仕様
マルチビームサイドスキャンソナー
| 周波数 | 455 kHz |
|---|---|
| ビーム数 | 両舷各5ビーム(計10ビーム) |
| パルス | 50 マイクロ秒 CW、 4、8、16 ミリ秒 チャープ |
| 進行方向解像度 | 10 cm @ 38 m レンジ 20 cm @ 75 m レンジ 36 cm @ 150 m レンジ 61 cm @ 250 m レンジ (リカナサンスモード) |
| 舷側方向解像度 | 3.75 cm |
| 推奨曳航速度 | 2 ノット ~ 10 ノット |
| 最大レンジ(片舷) | 250 m (リカナサンスモード) |
| 出力フォーマット | SDF、XTF、もしくはその両方 |
SBS(スワス測深)機能 ※オプション
| 周波数 | 455 kHz |
|---|---|
| ビーム数 | 両舷各1ビーム(計2ビーム) |
| パルス | CW、FM(最大16 ミリ秒チャープ) |
| 進行方向解像度 | 40 cm @ 70 m レンジ 100 cm @ 150 m レンジ |
| 舷側方向解像度 | 5.5 cm |
| 最大レンジ(片舷) | 125 m |
| 出力フォーマット | GSF、XYZ |
曳航体
| 材質 | 316ステンレス鋼 |
|---|---|
| 全長 | 2.03 m |
| 直径 | 16.8 cm |
| 重量 | 70.5 kg(気中)、47.7 kg(水中) |
| 耐圧深度 | 500 m (200 m @SBS機能付) |
| 標準アクセサリ | ・ヘディングセンサー ・ピッチ&ロールセンサー ・水圧センサー(0 m ~ 530 m、750 psia) ・アルチメーター(高度計) |
プロセッサー( TPU: Transceiver Processor Unit)
| 寸法 | 19インチラックマウント (高さ13.2 cm、奥行き 54.6cm) |
|---|---|
| 防塵・防水性能 | IP65相当 |
| 電源 | 115 VAC /240 VAC (ラックマウント: 110/220 VACのみ) |
| 消費電力 | 120 W |
オプションアクセサリ
・Kウィング1
・Kウィング2(デプレッサーウィング)
・レスポンダー など
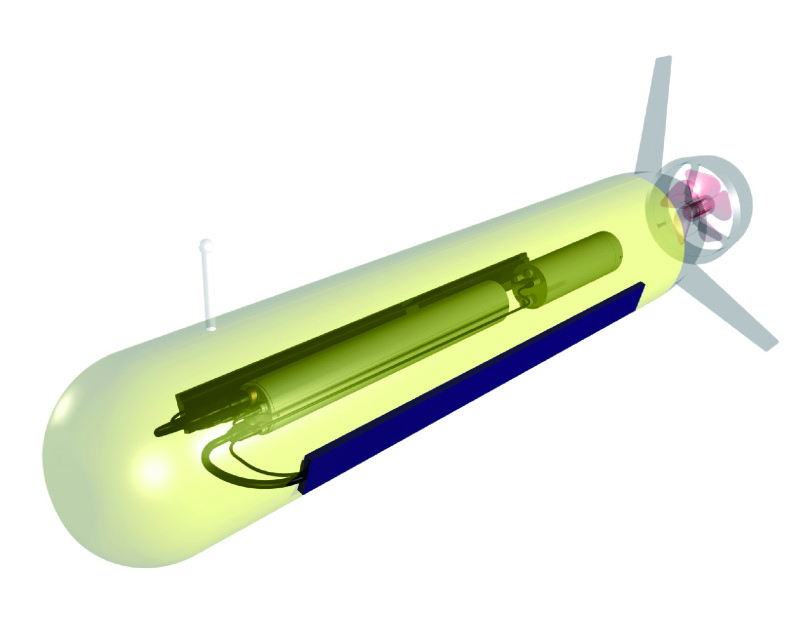
AUV用モジュール(SYSTEM AUV-5000 V2)
| 自律型水中ロボット(AUV) 用サイドスキャンおよび海底測量ソナーとして特別に設計されたAUV 用モジュールです。両側で各4 本(計8 本) の平行ソナービームを同時に生成すると共に、高度なビームステアリングとダイナミックフォーカシングを採用しており、高解像度の海底イメージを得ることができます。 オプションのSBS 機能(スワス測深機能) を追加することにより、全スワス範囲(曳航体高度の10 ~ 12 倍程度) の海底地形の推定値を同時に生成します。ビームフォーミングはAUV 5000 V2 エレクトロニクスによって行われるため、オンボードCAD / CAC ソフトウェアとの統合が可能です。 ※ 詳細仕様についてはお問い合わせください。 |
 |
 |
カタログダウンロード
PDFファイルを閲覧するには専用ソフトが必要です。
ソフトをお持ちでない方は、バナーをクリックして最新のAdobe Reader(フリーソフト)をダウンロードしてください。


