










SYSTEM AUV-5000 V2
AUV/UUV用ソナーペイロード

SYSTEM AUV-5000 V2
多機能サイドスキャンソナー
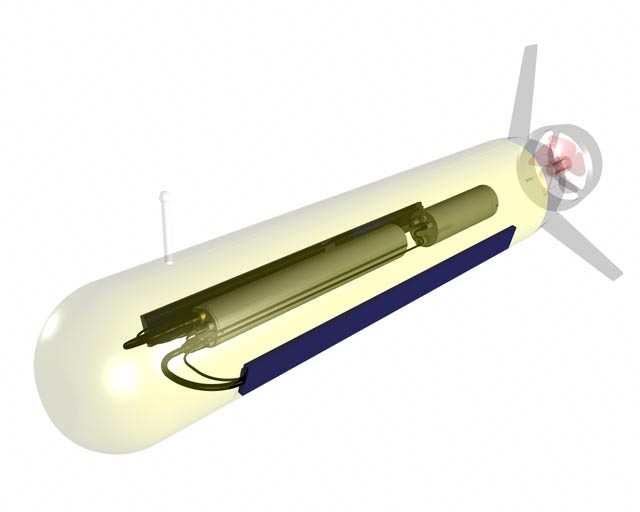
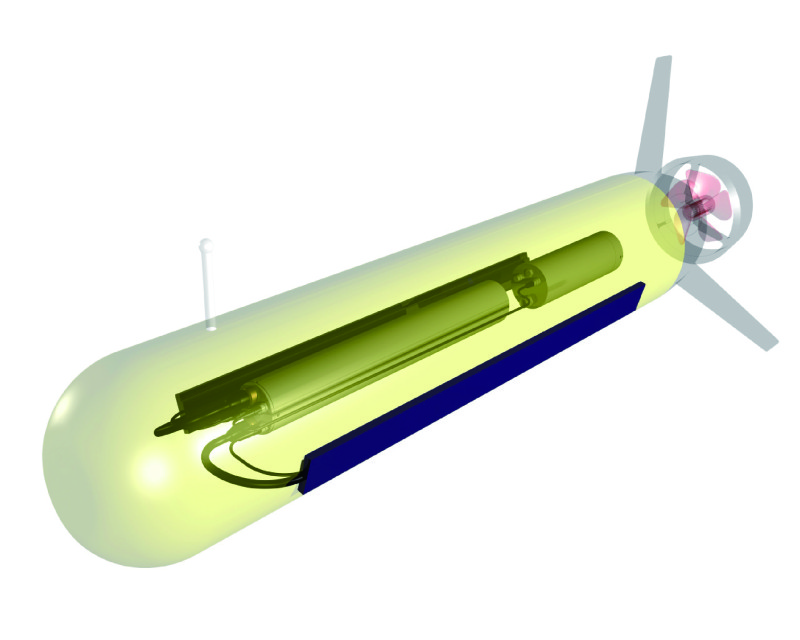
| 自律型水中ロボット(AUV) 用サイドスキャンおよび海底測量・探査ロボット用ソナーペイロードとして特別に設計された水中ロボット用モジュールです。 両側で各8 本(計16 本)の平行ソナービームを同時に生成すると共に、高度なビームステアリング、ダイナミックフォーカシング技術を用いることにより、シングルビームサイドスキャンソナーやマルチパルスサイドスキャンソナーでは到達できない高解像度海底イメージを安定して取得することができます。 オプションのインターフェロメトリスワス測深機能を追加すると、ソナーの全スワス(曳航体高度の10 ~ 12 倍程度)の3次元海底地形データを収録できます。この追加された海底地形データは後処理により、サイドスキャンのイメージデータと同時に記録され、海底ターゲットをより正確に捉えることができます。 ソナービームフォーミングはAUV 5000 V2 エレクトロニクスによって行われるため、オンボードCAD / CAC ソフトウェアとの統合が可能です。 |
 |
 |
特徴
・マルチビーム
・ダイナミックフォーカシング技術
・高度なビームステアリング
・オンボード処理(AUV)
・高速走行での100%ボトムカバレッジ
・高度なノイズ除去回路
・ワイドバンドFM チャープ
・インターフェロメトリスワス水深
・SAS 互換ハードウェア
サイドスキャンソナーとは
| 曳航体(トウフィッシュ) の左右から扇状に超音波を発信し、返ってきた音波(エコー) の反射強度の濃淡を連続描画することにより、海底面を航空写真のような広範囲の画像として取得することができる技術です。底質分類調査(礫、砂、泥、藻場などの分布) や、漁礁などの構造物の状態調査、落下物の捜索など様々な用途に用いることができます。 | 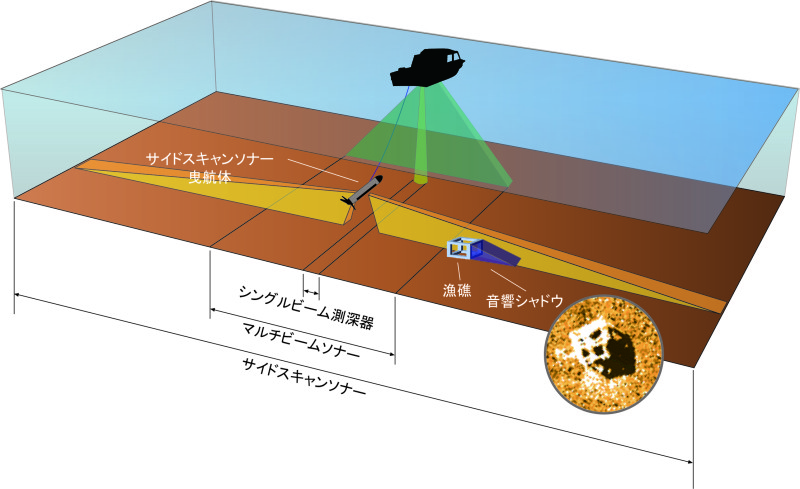 |
仕様
マルチビームサイドスキャンソナーモジュール
| 周波数 | 455 kHz |
|---|---|
| ビーム数 | 両舷各8ビーム(計16ビーム) |
| パルス | 50 マイクロ秒 CW、 4、8、16 ミリ秒 チャープ |
| 進行方向解像度 | 10 cm @ 38 m レンジ 20 cm @ 75 m レンジ 36 cm @ 150 m レンジ 61 cm @ 250 m レンジ |
| 舷側方向解像度 | 3.75 cm |
| 最大レンジ(片舷) | 250 m (500 m スワス) |
| センサー | ・ヘディングセンサー ・ピッチ&ロールセンサー |
| 耐圧深度 | 500 m |
| 消費電力 | 85 W(150 m レンジ、8ミリ秒チャープ) ~ 110 W(150 m レンジ、16ミリ秒チャープ) |
| インターフェース | 100 BaseT イーサネット LAN |
| 出力フォーマット | SDF、XTF、もしくはその両方 |
| トリガー出力 | CMOS/TTL信号、1ms |
インターフェロメトリスワス測深(オプション)
| 周波数 | 455 kHz |
|---|---|
| ビーム数 | 両舷各1ビーム(計2ビーム) |
| パルス | FM (最大16 ミリ秒チャープ) |
| 進行方向解像度 | 0.4 ° |
| 最大レンジ(片舷) | 125 m |
| 出力フォーマット | GSF |
| アレイ長 | 120 cm |
| 重量 | 5.26 kg(気中)、2.27 kg(水中) |
ソナープロセシングユニット (SPU)
| 寸法 | L40.6 cm × Φ12.7 cm |
|---|---|
| 重量 | 12.7 kg(気中)、7.3 kg(水中) |
| 入力電圧 | 18 VDC ~ 36 VDC |
ソナーエレクトロニクスユニット (SEU)
| 寸法 | L91.4 cm × Φ11.4 cm |
|---|---|
| 重量 | 19.8 kg(気中)、11.0 kg(水中) |
ソフトウェア
| AUV-5000 V2 は、スワスフォーミングプロセスが、アナログディレイラインやフェーズシフター、アナログ乗算器&除算器ではなく、デジタル信号処理(DSP) を使用してデジタル実装されるという点で、以前のマルチビームシステムと異なります。 この事により、ペイロードのサイズと重量が減少し、AUV ・ROV 等をより軽量に設計できると共に、スワス処理の柔軟性が向上し、操作パラメーターのソフトウェア制御が可能になります。 |
 |
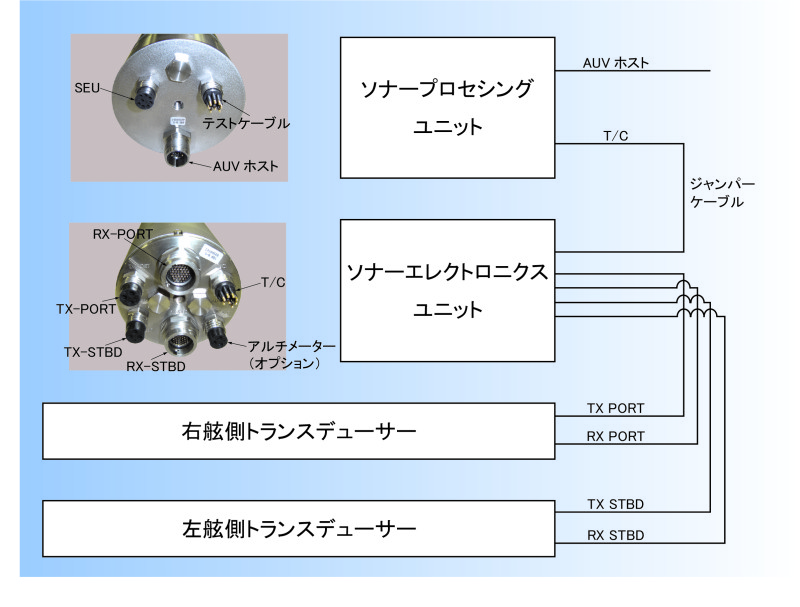
システム構成
 |
カタログダウンロード
PDFファイルを閲覧するには専用ソフトが必要です。
ソフトをお持ちでない方は、バナーをクリックして最新のAdobe Reader(フリーソフト)をダウンロードしてください。


